







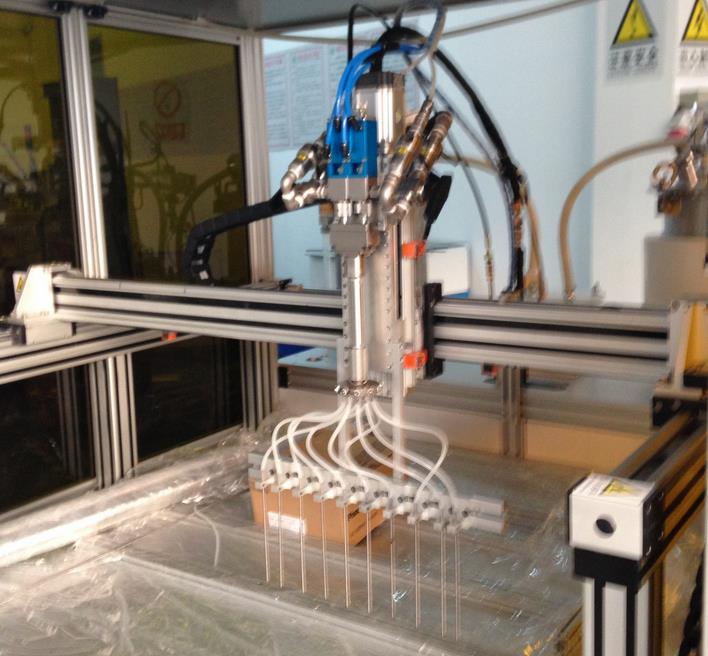








全自动机械手主要由于手部和运动机构组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型。托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、机械手配件移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度。为了抓取空间中任意位置和方位的物体,需有6个自由度。(全自动机械手 http://www.szjingdifng.com/products-detail.asp?cpid=47)
.jpg)
![]()

